

Momenteel zitten we in de kern van ons onderzoek: Een grote groep van 60-70 testpersonen wordt in de HUBRIS rijsimulator op de A50 rondgereden om de anticiperende algoritmes te beoordelen. Hierbij een kleine impressie van wat de testpersonen meemaken in de simulator:
Vandaag konden we een succesvolle start maken met de dataverzameling. De eerste 5 testpersonen hebben zonder grote opstartproblemen in de rijsimulator gereden. Hierbij hebben we zowel fysiologische data (eye tracking, skin conductance) als kwalitatieve data (questionnaire, feedback device, interviews) verzameld. Het uiteindelijke doel: wetenschappelijk verantwoorde ontwikkeling van autonoom voertuiggedrag dat door passagiers als minder risicovol – en daarmee veiliger en comfortabeler – wordt ervaren.

Na een intensieve periode van doorontwikkeling van zowel de rijsimulator als de HUBRIS Human Counterpart algoritmes is het dan echt zover: We gaan starten met het verzamelen van onderzoeksdata met een grote groep participanten. Hiervoor zoeken we nog testparticipanten. Als participant wordt je in de rijsimulator door een autonoom voertuig virtueel van Arnhem naar Apeldoorn gereden over de A50. Tijdens de rit maak je een aantal manoeuvres mee waarbij je het voertuiggedrag beoordeelt op het risico dat je hierbij ervaart. Voor en na de rit wordt je geïnterviewd. De testperiode duurt tot 12 juni en geïnteresseerde deelnemers kunnen zich melden via deze datumprikker: https://datumprikker.nl/afspraak/inschrijven/p6xdrczs7ypey2wg

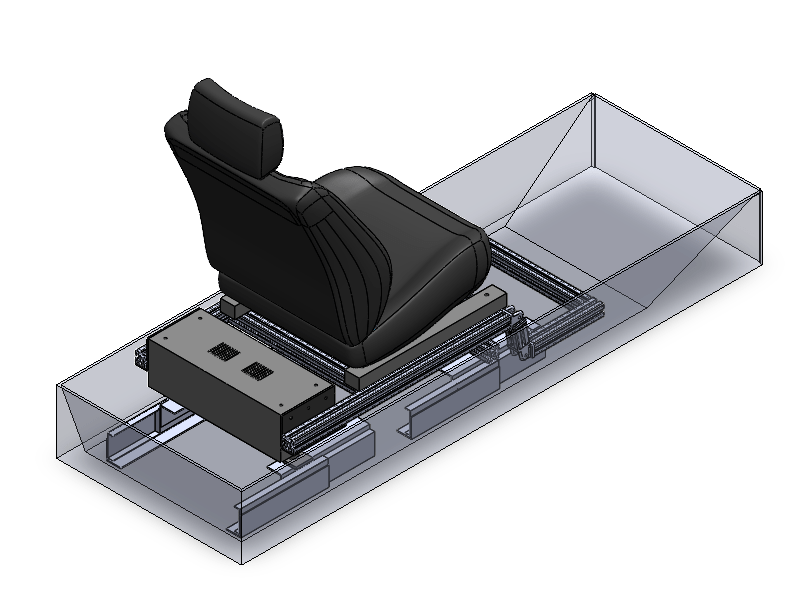
In aanloop naar een nieuwe testsessie voor de rijsimulator is het motion platform operationeel gemaakt in de Volvo XC90 gebaseerde rijsimulator. Het motion platform onder de bijrijderstoel heeft vier graden van vrijheid:
- Pitch
- Roll
- Surge
- Belt tensioner
Alle graden van vrijheid worden intussen aangestuurd via live telemetrie en zijn individueel aanpasbaar. Tijdens de testsessie zijn direct wat verbeteringen in de ‘motion cueing’ aangebracht om het realisme van rijervaring in de simulator op de geplande snelwegscenario’s te verbeteren.
Vanmiddag hebben we opnieuw tests gedaan met de simulator. Het doel was tweeledig: allereerst hebben we wat updates in de techniek getest. Dot betrof beter visuals, intussen op basis van Unreal Engine versie 5 in plaats van versie 4, wat een grote visuele verbetering geeft. Ook is de weggeometrie van de A50 tussen Arnhem en Apeldoorn intussen in de simulatie aanwezig en tegelijk is een tussentijdse versie van het motion platform getest, voorlopig met twee graden van vrijheid: pitch en roll. Binnenkort hopen we het motion platform in de Volvo te monteren en dan zal het platform ook een surge beweging bieden.
Het belangrijkste doel was echter om de gehele testprocedure met de testpersonen te evalueren met twee HAN collega’s uit andere projecten als proefpersoon. De middag heeft veel inzichten gegeven die meegenomen worden in maandelijkse sprints waarmee we medio 2025 tot een goed functionerende rijsimulator en testprocedure willen komen

Twee tweedejaars studenten werktuigbouwkunde hebben een motion platform ontwikkeld dat onder de passagiersstoel van de Volvo XC90 kan worden gemonteerd. Het motion platform is bedoeld om testpersonen een zo realistisch mogelijke rijervaring te geven, terwijl ze virtueel als passagier in het autonome voertuig meerijden op de snelweg. Het platform heeft 3 graden van vrijheid: Pitch, roll en surge.
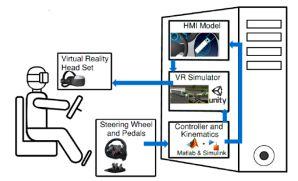
Vandaag hebben we allemaal de eerste integratie van de HUBRIS rijsimulator kunnen ervaren. In de HUBRIS rijsimulator zit je met een VR bril op in een Volvo XC90 en wordt je als passagier meegenomen op de A50 tussen Arnhem en Apeldoorn. De simulator laat je verschillende scenario’s beleven die relevant zijn voor het onderzoek. Je wordt bijvoorbeeld van links ingehaald en die auto komt kort voor je op jouw rijbaan, of er voegt iemand in op jouw baan vanaf een invoegstrook aan de rechterkant. De techniek is nog niet af, maar er is als en stukje A50 met goede Nederlandse ‘look-and-feel’ beschikbaar, er zijn trillingen van het rijden en ook rijgeluiden zijn beschikbaar. Daarmee hebben we een eerste goede stap gezet. Nu is het zaak om de simulator uit te breiden met betere motion experience, een groter stuk snelweg, verbeterde rijgeluiden en de goede scenario’s.

Het plenaire overleg werd deze keer gehost door TU Delft, waarbij we de mogelijkheid hadden om daar de onderzoeklabs voor rijhulpsystemen en autonoom rijden te bewonderen. Vooral de full-scale, dynamische rijsimulator maakte indruk. Een paar vrijwilligers hebben die life kunnen ervaren. Deze simulator biedt de nodige ‘motion experience’ die we in de HUBRIS rijsimulator ook willen integreren. Tijdens het plenaire overleg is afgesproken om het volgende overleg fysiek bij de HAN te plannen om daar een eerste versie van de HUBRIS rijsimulator te kunnen ervaren.

Vandaag is een Volvo XC90 gearriveerd bij de HAN. Dit voertuig is ter beschikking gesteld door Volvo Nederland en zal worden ingezet voor onderwijs en onderzoek. Voor HUBRIS zal het worden aangepast om als rijsimulator dienst te doen. HAN heeft eerder een dergelijke rijsimulator voor truck docking ontwikkeld, in samenwerking met Hochschule Rhein Waal voor project VISTA (www.vistaproject.eu). Voor HUBRIS werken beide partijen weer samen voor een personenwagen variant op basis van deze Volvo.

Vandaag was Royal Haskoning DHV de host voor een plenair overleg. Tijdens dit overleg werd de voortgang van werkpakket 2 gepresenteerd: twee master thesis studenten werken aan dataset analyse en ontwikkeling van algoritmes voor de human counterpart in de beoogde snelwegscenario’s. Het werk is verdeeld over anticiperende aspecten en beslissende aspecten. Daarnaast werd veel gesproken over de resultaten van de werkgroep Experiment Design. De werkgroep is grotendeels klaar met het ontwerp op hoofdlijnen van de experimenten in de rijsimulator. Dit ontwerp geeft extra input voor het technisch ontwerp van de simulator.

Op basis van de input uit de focus meetings, de Advisory Board en de ontwikkelde inzichten in de werkgroep Experiment Design is een voorlopig besluit genomen om volledig te focussen op personenauto’s. Daarmee komt de truck driving use case te vervallen. Dit biedt ruimte om de experimenten met meer rigor uit te voeren, waarmee we een ‘less is more’ bandering kiezen. Dit voorlopige besluit is afgestemd met de stuurgroep, die dit heeft onderschreven. Daarmee vervalt de truck driving use case. Wel zullen trucks mogelijk als overige verkeersdeelnemers in het onderzoek worden meegenomen.
Als support voor werkgroep Simulator Development is een aparte werkgroep ‘Experiment Design’ van start gegaan. Deze werkgroep richt zich op ontwerp van de experimenten, waarbij de uitkomsten van de werkgroepen KPI’s en Scenario Selection als startpunt worden gebruikt. In de nieuwe werkgroep worden de experimenten voor de rijsimulatortests ontworpen, zowel op het gebied van de ‘epsiodes’ die de testpersonen meemaken in de simulator, als ook de gehele workflow, zoals de interviews en metingen die worden gedaan voor, tijdens en na de experimenten. Daarnaast is in werkpakket 2 een werkgroep gestart die zich richt op ‘Lane Change Predictors’.
In een handover sessie hebben de werkgroepen KPI’s en Scenario Selection hun conclusies en resultaten overgedragen aan de werkgroep Simulator Development. Er is een duidelijk overzicht van KPI’s en mogelijke meetmethoden beschikbaar gekomen en tevens zijn twee snelweg scenario’s geselecteerd: een voertuig dat links inhaalt en vervolgens invoegt voor het ego voertuig en een voertuig dat vanuit een invoegstrook van rechts invoegt voor het ego voertuig:

De HUBRIS Advisory Board gaf in haar eerste bijeenkomst waardevolle input mee aan het projectconsortium. De gekozen focus werd begrepen, al maakte de Board duidelijk dat dan wel goed duidelijk gemaakt moet worden wat het project toevoegt aan de maatschappij. Ook is het van belang om een realistische rijbeleving in een VR-bril gebaseerde rijsimulator te creëren om het verschil tussen een ‘normale ACC’ implementatie en de Human Counterpart-gebaseerde HUBRIS oplossing voldoende goed te ervaren. Daarnaast was de Board van mening dat het gekozen passagiersperspectief niet speelt bij de truck driving use case.
Vandaag zijn drie werkgroepen van start gegaan om het werk in HUBRIS verdere focus en invulling te geven. De werkgroepen hebben elk hun specifieke doelen en hanteren duidelijke deadlines om die doelen te halen. Elke werkgroep heeft een eigen samenstelling met een deel van de consortiumpartners. De volgden werkgroepen zijn gestart:
- Werkgroep KPI’s: deze werkgroep richt zich op het vaststellen van de KPI’s in het rijsimulator onderzoek en tevens de praktische tests op de snelweg. De werkgroep levert haar uitkomsten op in januari 2024
- Werkgroep Scenario Selection: deze werkgroep richt zich op selectie van de meest relevante scenario’s voor de rijsimulatortests en benoemt tevens de relevante aspecten met betrekking tot anticiperen in die scenario’s. De werkgroep houdt rekening met praktische validatie met het testvoertuig. De werkgroep levert haar uitkomsten op in januari 2024
- Werkgroep Simulator Development: deze werkgroep was effectief al werkzaam in het kader van werkpakket 3 en richt zich op ontwikkeling van de rijsimulator. Op dit moment richt de ontwikkeling zich vooral op de benodigde techniek. Doel is om medio 2024 een eerste geïntegreerde, functionele rijsimulatoromgeving beschikbaar te hebben
Vandaag werd de plenaire ‘HUBRIS Community Meeting’ gehost door V-Tron. Tijdens het overleg werd gesproken over nadere focus in het project, zoals dat in aparte focus meetings in de maand september is besproken. Vooralsnog zal het project zich richten op anticiperend c.q. reactief gedrag van ADS systemen dat wordt ervaren als ‘comfortabel en veilig’. We richten ons daarbij op de beleving van personen in het ego-voertuig, waarbij we alleen kijken naar het longitudinale gedrag van het ego-voertuig (‘stay-in-lane’). In de komende periode zal verder worden nagedacht over de gewenste leeruitkomsten van de rijsimulatortests en het al dan niet meenemen van de truck driving use case. Wel is al besloten dat we ons in dat geval zullen richten op highway driving van trucks en niet op truck docking. Tijdens het bezoek aan V-Tron hebben we het testvoertuig kunnen bewonderen en tevens een opstelling voor tele-operatie in werking gezien.

Het PhD onderzoek dat was gepland als parallel, ondersteunend onderzoek aan HUBRIS is helaas om persoonlijke redenen met minimaal een jaar uitgesteld. Hiermee verminderd de beschikbare onderzoekscapaciteit met betrekking tot HUBRIS en de impact is daarom met subsidiegever SIA besproken. Om het huidige momentum in het consortium niet te verliezen is in gezamenlijkheid besloten om het project niet te vertragen en waar nodig een scherpere focus aan te brengen in het licht van de beperkte onderzoekscapaciteit.
Vandaag bracht een HUBRIS delegatie een bezoek aan de TNO rijsimulator, waarin technologie gebruikt wordt die ook in HUBRIS als oplossingsroute voor het rijsimulator onderzoek in werkpakket 3 wordt gezien. Het bezoek was deels ter inspiratie en deels om te kunnen leren van de ervaringen die TNO heeft opgedaan bij de ontwikkeling van de rijsimulator. De TNO simulator werkt met grote schermen, terwijl voor de rijsimulator in HUBRIS een oplossing met behulp van een VR bril wordt beoogd.

Vandaag was Breda University of Applied Sciences de host voor een plenair overleg (‘Technical Meeting’) en de eerste stuurgroep bijeenkomst. In de Technical Meeting was er veel goede discussie en werd de behoefte geuit om in toekomstige overleggen meer tijd te reserveren voor dergelijke discussies omdat deze als zeer waardevol worden gezien. De meest belangrijke input vanuit de stuurgroep was het advies om de projectdoelen – en de weg daar naartoe – scherper te definiëren.
Alhoewel formaliteiten slechts onderliggende zaken zijn waarmee we onze onderzoeksdoelen willen bereiken zijn we toch blij dat we kunnen melden dat we in de afgelopen periode op het formele vlak goede voortgang hebben kunnen boeken: Het Data Management Plan (DMP) is ingediend en intussen goedgekeurd door subsidiegever SIA. Parallel hieraan is de tekst van de samenwerkingsovereenkomst nu definitief en rondgestuurd voor ondertekening door alle projectpartners.

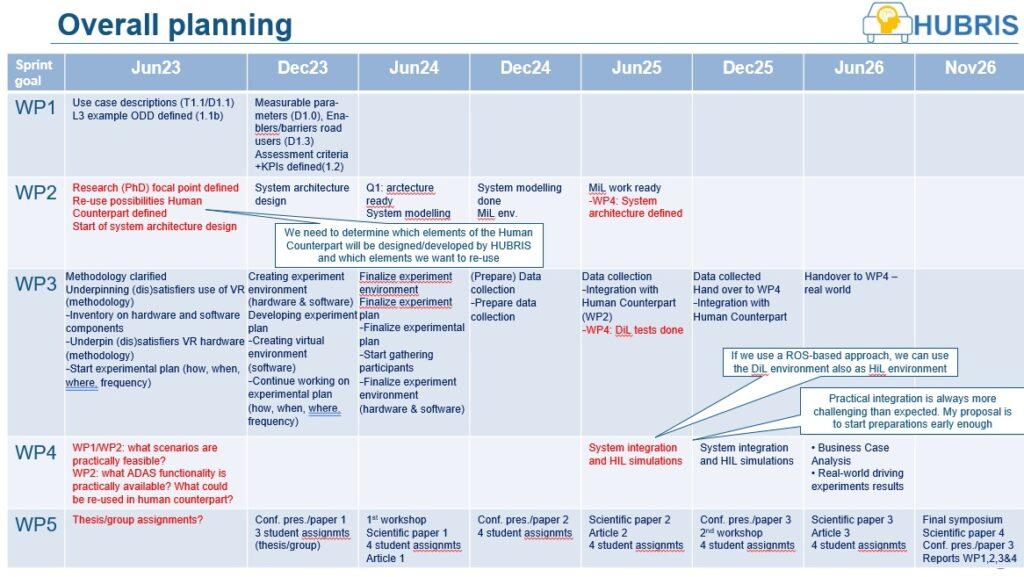
HUBRIS wordt operationeel aangestuurd door de Project Board, die bestaat uit de trekkers van de werkpakketten en de projectleider. In een recente Project Board bijeenkomst heeft de Board een eerste geconsolideerde projectplanning gedefinieerd. Deze planning is samengesteld uit planningen van de individuele werkpakketten. Het is een eerste versie van een levende, integrale planning, van waaruit het project wordt aangestuurd. De planning is onderverdeeld in ‘sprints’ van 6 maanden en zal continu op basis van de laatste inzichten worden aangepast.
Op dinsdag 10 januari ging RAAK-PRO project HUBRIS (Human-Like Behaviour of Robotic In-Vehicle Systems) van start. Van de meeste van de 18 consortiumpartners en de 5 ondersteunende organisaties waren vertegenwoordigers aanwezig tijdens deze levendige interactieve sessie.
Projectleider Jan Benders heette de aanwezigen welkom en gaf een korte introductie van HUBRIS. De opzet is verdeeld in 5 werkpakketten, die deels opvolgend en deels parallel zullen worden uitgevoerd in de periode januari 2023 tot en met december 2026. De start van het project is enigszins vertraagd, maar Regieorgaan SiA heeft toegestaan om de volledige 4 jaar de tijd te nemen voor de uitvoering van het project.
Achtereenvolgens gaf Jan de leiders van de werkpakketten het woord om hun aandeel in het project kort toe te lichten. Zelf sloot hij de middag af met een overzicht van de administratieve verplichtingen die regieorgaan SiA van de HUBRIS-partners en projectmanager verwacht.
Lees meer over dit project (basis van HUBRIS, definitie van wensen, systemen modificeren en modellen bouwen, praktijktesten met betrokkenheid van bestuurders, integratie en demonstratie van HUBRIS, Communicatie en Disseminatie) in deze speciale nieuwsbrief (pdf)
Voor meer informatie kun je ook contact opnemen met collega Abhishek Tomar.
Bron: Nieuwsbrief Automotive Research