
Project HUBRIS
HUBRIS is een samenwerking om het gebruik van Automated Driving Systems (ADS) te bevorderen door de systemen meer mensachtige gedragingen te laten vertonen; the human counterpart.
HUBRIS staat voor HUman-like Behaviour of Robotic In-vehicle Systems: het ontwikkelen van een zelflerend besturingssysteem op hoog niveau, namelijk ‘human counterpart’, om de kloof tussen bestuurders en ADS te overbruggen.
HAN Automotive Research is trekker van het project
HUBRIS: HUman-like behaviour of robotics in-vehicle systems, phase 2
Automated Driving Systems
Verkeersongevallen vormen wereldwijd een ernstig probleem voor de volksgezondheid en zijn verantwoordelijk voor ongeveer 1,35 miljoen doden per jaar. Naast het verlies aan levens zijn ook de maatschappelijke kosten gerelateerd aan het verkeer (ongevallen, congestie en milieuschade) aanzienlijk.
In Nederland bijvoorbeeld bedroegen deze maatschappelijke kosten in 2018 ongeveer 28 miljard euro, waarbij verkeersongevallen alleen al goed waren voor ongeveer 17 miljard euro. Ongeveer de helft van de verkeersongevallenkosten komt voort uit ernstig letsel en dodelijke slachtoffers, en het aantal verkeersdoden in Nederland neemt weer toe (figuur 1).
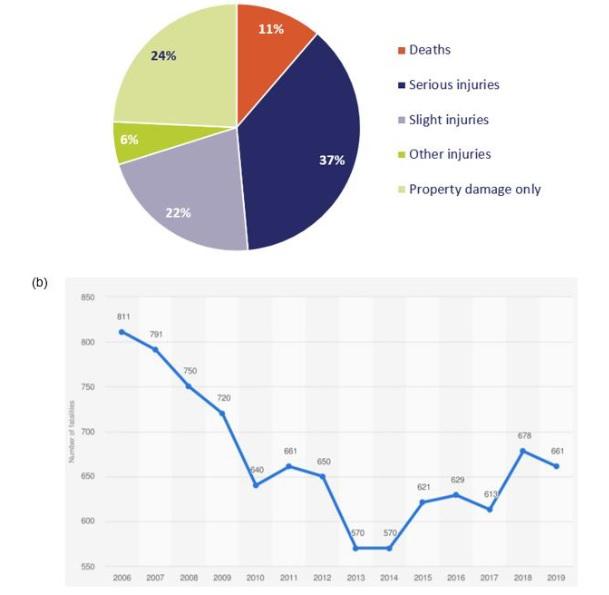
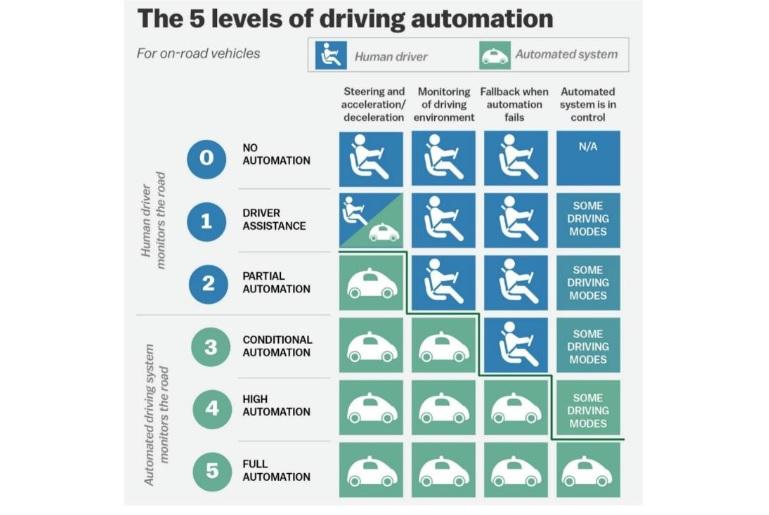
Veel deskundigen zijn van mening dat Automated Driving Systems (ADS) op verschillende automatiseringsniveaus het aantal doden en gewonden in het verkeer aanzienlijk kunnen verminderen (figuur 2).
De Europese Unie erkent het veelbelovende potentieel van ADS en stelt vanaf 2022 verschillende ADS1 verplicht in nieuwe voertuigen. Deze verplichte ADS kunnen tegen 2038 meer dan 25.000 levens redden en minstens 140.000 ernstige verwondingen voorkomen. De Nederlandse nationale regering erkent ook het veiligheidspotentieel van ADS en investeert in het programma Smart Mobility, dat gericht is op de invoering ervan en op een betere aanvaarding door automobilisten.
Ondanks de toename van het aantal ADS in de loop der jaren, die verschillende automatiseringsniveaus ondersteunen, is er nog geen significante verbetering van de verkeersveiligheid waargenomen. Een van de belangrijkste redenen hiervoor is wellicht het geringe nut van ADS en de acceptatie ervan door de bestuurders. Dit komt doordat ADS in verschillende situaties die bestuurders als fundamenteel beschouwen, tekortschiet en het moeilijke deel – zoals het rekening houden met de belangen van andere weggebruikers – meestal aan de bestuurders overlaat. Bovendien wordt de bestuurder door ADS (tijdelijk) uit de regelkring gehaald en ontstaan er problemen buiten de regelkring, zoals een verminderd situatiebewustzijn.
In combinatie met een gebrek aan kennis bij de bestuurder over de functies en beperkingen van ADS kunnen zelfs alledaagse situaties kritiek worden, zoals besproken in het rapport van de Onderzoeksraad voor Veiligheid over de analyse van verkeersongevallen in Nederland in 2016-2019 met ADS.
Kortom, ADS ondersteunt bestuurders alleen binnen de vooraf vastgestelde veiligheids- en comfortmarges zonder rekening te houden met de perspectieven en behoeften van de bestuurders, waardoor zij zich niet op een natuurlijke manier kunnen gedragen en interageren met bestuurders en andere weggebruikers. Aan de andere kant zijn bestuurders vatbaar voor afleiding (wanneer ze buiten het circuit zijn), kunnen ze de verkeersomgeving niet in de gaten houden en onvoldoende toezicht houden op de ADS.
Deze aspecten leiden op hun beurt tot een kloof tussen bestuurders en ADS, waardoor bestuurders gaan twijfelen aan het nut van ADS en vervolgens de acceptatie en het gebruik van ADS door bestuurders wordt beïnvloed en de verwezenlijking van het werkelijke veiligheidspotentieel van ADS wordt beperkt.
Om dit kritieke probleem op te lossen, beoogt HUBRIS-fase 2 de ontwikkeling van een hoogwaardige controller, namelijk de menselijke tegenhanger, om de gedragskloof tussen bestuurders en ADS te overbruggen. De menselijke tegenhanger zal de coördinatie en samenwerking tussen bestuurders en ADS verbeteren door de voorkeuren van de bestuurder te observeren en te vertalen naar functionele ADS-instellingen, bijvoorbeeld het aanpassen van de rijtijd voor adaptieve cruisecontrol (ACC) afhankelijk van de situatie.
Door zelfstudie zal de menselijke tegenhanger zichzelf langzaam kunnen optimaliseren door voortdurend de rijstijl (voorkeuren en reacties) van de bestuurder te observeren. Hierdoor zal de menselijke tegenhanger zich kunnen aanpassen aan bestuurders met verschillende demografische en kennisachtergronden.
HUBRIS fase 2 zal de menselijke tegenhanger voornamelijk demonstreren in een snelwegomgeving met ACC en rijbaanassistentie (figuur 3a). Een secundaire use-case van automatisch aandocken van een geleed voertuig in een distributiecentrumomgeving wordt ook overwogen om de algemene toepasbaarheid van het systeem van de menselijke tegenhanger te demonstreren (figuur 3b). Het project zal de invloed van het systeem van de menselijke tegenhanger op de aanvaarding en het gebruik van ADS door bestuurders in deze use-cases beoordelen.

Contact informatie
Projectleider
Jan Benders MSc
Program Manager Control Systems –
HAN Automotive Research
Jan.Benders@han.nl
+31(0)6-12537646
HUBRIS is een RAAK-PRO project, gefinancierd door Regieorgaan SIA.
